viktor.geometry
Arc
- class viktor.geometry.Arc(centre_point, start_point, end_point, short_arc=True, *, n_segments=30, color=(0, 0, 0), identifier=None)
Bases:
TransformableObjectCreates a constant radius arc in the xy plane. Clockwise rotation creates an outward surface.
- Parameters:
centre_point (
Point|Tuple[float,float,float]) – Point in xy plane.start_point (
Point|Tuple[float,float,float]) – Point in xy plane. Should have the same distance to centre_point as end_point.end_point (
Point|Tuple[float,float,float]) – Point in xy plane. Should have the same distance to centre_point as start_point.short_arc (
bool) – Angle of arc smaller than pi if True, larger than pi if False.n_segments (
int) – Number of discrete segments of the arc (default: 30)New in v13.5.0.color (
Color) – Visualization colorNew in v13.5.0.identifier (
str) – object identifier (new in v14.10.0)
- property angle: float
Absolute angle of the arc in radians, which is the difference between theta1 and theta2.
- discretize(num=2)
Returns a discrete representation of the arc, as a list of Point objects. The amount of points can be specified using ‘num’, which should be larger than 1.
- Return type:
List[Point]
- property length: float
Arc length.
- property n_segments: int
- property radius: float
- revolve(*, rotation_angle=None, material=None, identifier=None, **kwargs)
Returns an ArcRevolve object, revolved around the global y-axis.
- Parameters:
rotation_angle (
float) – Angle of the revolved object according to the right-hand-rule, with the start of the rotation in positive z-direction. Angle in radians. If not specified, 2 pi will be used.material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
- Return type:
- property short_arc: bool
- property theta1: float
Angle of the end point with respect to the x-axis in radians.
- property theta1_theta2: Tuple[float, float]
Angles of the end (theta1) and start (theta2) points with respect to the x-axis in radians.
- property theta2: float
Angle of the start point with respect to the x-axis in radians.
ArcExtrusion
- class viktor.geometry.ArcExtrusion(profile, arc, profile_rotation=0, n_segments=50, *, material=None, identifier=None)
Bases:
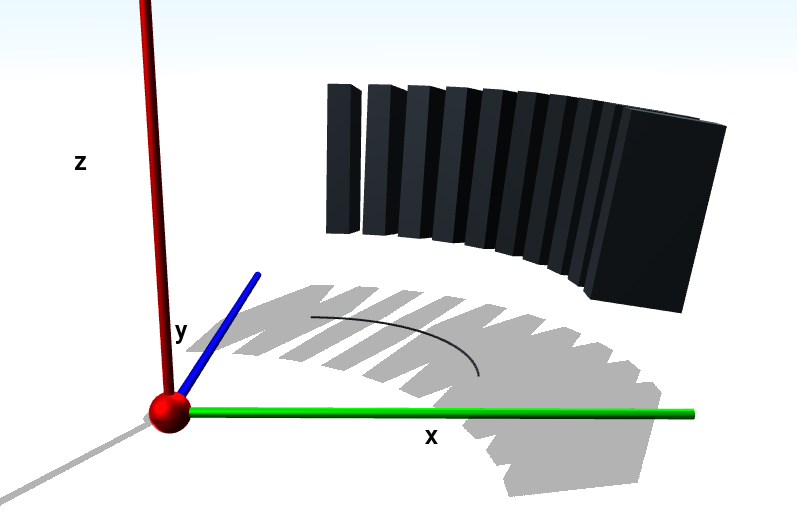
GroupGiven an Arc and a cross-section of the extrusion, a discretized Extrusion object is returned.
The coordinates of the profile are defined with respect to the Arc and have a LOCAL coordinate system:
z-axis is in direction of the arc from start to end.
x-axis is in positive global z-axis.
y-axis follows from the right-hand-rule.
Rotation of the profile is about the axis according to the right-hand-rule with LOCAL z-axis (see definition above).
Example:
profile = [ Point(1, 1), Point(1, 2), Point(3, 2), Point(3, 1), Point(1, 1), ] arc = Arc(Point(1, 1, 0), Point(3, 1, 0), Point(1, 3, 0)) arc_ext = ArcExtrusion(profile, arc, profile_rotation=10, n_segments=10)This will result in the following visualization, where the Arc itself is also shown in the xy plane:
- Parameters:
profile (
List[Point]) – Coordinates of cross-section.arc (
Arc) – An Arc object is used to define the direction of the extrusion.profile_rotation (
float) – Rotation of the profile around its local Z-axis in degrees.n_segments (
int) – Number of discrete segments of the arc, which is 50 by default.material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
ArcRevolve
- class viktor.geometry.ArcRevolve(arc, *args, rotation_angle=None, material=None, identifier=None, **kwargs)
Bases:
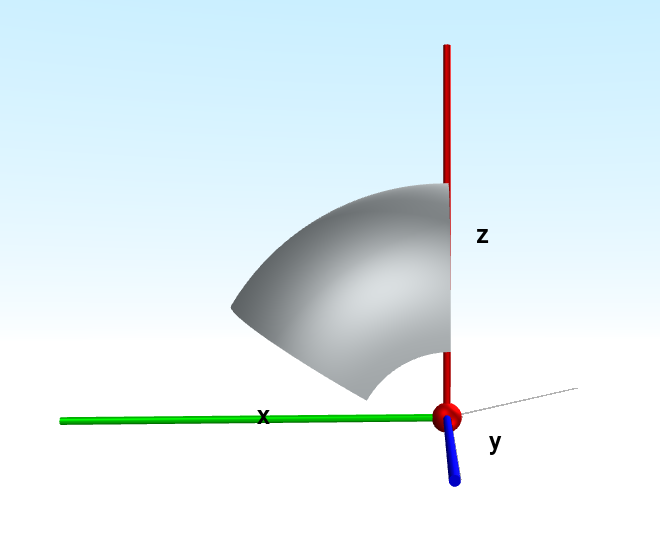
RevolveReturns a revolved object of an arc around the global y-axis.
In the example below, rotation_angle is equal to pi / 3:
- Parameters:
arc (
Arc) – Arc object.rotation_angle (
float) – Angle of the revolved object according to the right-hand-rule, with the start of the rotation in positive z-direction. Angle in radians. If not specified, 2 pi will be used.material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
- property height: float
Height of the object.
- property inner_volume: float
Returns the inner volume of the revolved object.
This method will only return a value if the defined Arc meets the following conditions:
it should be short, i.e. short_arc=True
the start- and end-point are located on the same side w.r.t. the y-axis of the center-point of the Arc
it is defined in clockwise direction
- property surface_area: float
Total exterior area of the object.
- property uuid: str
BidirectionalPattern
- class viktor.geometry.BidirectionalPattern(base_object, direction_1, direction_2, number_of_elements_1, number_of_elements_2, spacing_1, spacing_2, *, identifier=None)
Bases:
PatternInstantiates a two-dimensional pattern, evenly spaced in two separate directions. If identifier has been set on the base-object, the identifiers of the objects within the pattern are suffixed with ‘-i’ (i = 1, 2, 3, …).
- Parameters:
base_object (
TransformableObject) – the object to be duplicateddirection_1 (
List[float]) – a unit vector specifying the first directiondirection_2 (
List[float]) – a unit vector specifying the second directionnumber_of_elements_1 (
int) – total amount of elements along direction 1number_of_elements_2 (
int) – total amount of elements along direction 2spacing_1 (
float) – the applied spacing in direction 1spacing_2 (
float) – the applied spacing in direction 2identifier (
str) – object identifier (new in v14.10.0)
CartesianAxes
- class viktor.geometry.CartesianAxes(origin=Point(0.000e+00, 0.000e+00, 0.000e+00), axis_length=1, axis_diameter=0.05)
Bases:
GroupHelper visualisation object to show positive x (red), y (green) and z (blue) axes.
- Parameters:
origin (
Point) – Coordinates of the origin.axis_length (
float) – Length of the axes.axis_diameter (
float) – Diameter of the axes.
CircularExtrusion
- class viktor.geometry.CircularExtrusion(diameter, line, *, shell_thickness=None, material=None, identifier=None)
Bases:
TransformableObjectThis class is used to construct an extrusion which has a circular base, e.g. a circular foundation pile.
- Parameters:
diameter (
float) – Outer diameter of the cross-section.line (
Line) – Line object along which the circular cross-section is extruded.shell_thickness (
float) – Optional shell thickness. None for solid (default: None)New in v13.6.0.material (
Material) – Optional material.identifier (
str) – object identifier (new in v14.10.0)
- property cross_sectional_area: float
- property diameter: float
- property length: float
- property radius: float
- property shell_thickness: float | None
Cone
- class viktor.geometry.Cone(diameter, height, *, origin=None, orientation=None, material=None, identifier=None)
Bases:
TransformableObjectCreates a cone object.
- Parameters:
diameter (
float) – Diameter of the circular base surface.height (
float) – Height from base to tip.origin (
Point) – Optional location of the centroid of the base surface (default: Point(0, 0, 0)).orientation (
Vector) – Optional orientation from origin to the tip (default: Vector(0, 0, 1)).material (
Material) – Optional material.identifier (
str) – object identifier (new in v14.10.0)
- classmethod from_line(diameter, line, *, material=None, identifier=None)
Create a Cone object by a given base diameter and line.
- Parameters:
diameter (
float) – Diameter of the circular base surface.line (
Line) – Line from base to top of the cone. The start point of the line represents the location of the center of the base, and the end point represents the tip of the cone.material (
Material) – Optional material.identifier (
str) – object identifier (new in v14.10.0)
- Return type:
Extrusion
- class viktor.geometry.Extrusion(profile, line, profile_rotation=0, *, material=None, identifier=None)
Bases:
GroupExtruded object from a given set of points, which is called the profile. This profile should meet the following requirements:
start point should be added at the end for closed profile
points should be defined in z=0 plane
circumference should be defined clockwise
Note that the profile is defined with respect to the start point of the Line object, i.e. the profile is defined in the local coordinate system. An example is given below of two extrusions with the same dimensions. Their corresponding Line objects are also visualized. The extrusion have the following profile:
# black box profile_b = [ Point(1, 1), Point(1, 2), Point(2, 2), Point(2, 1), Point(1, 1), ] box_b = Extrusion(profile_b, Line(Point(4, 1, 0), Point(4, 1, 1))) # yellow box profile_y = [ Point(-0.5, -0.5), Point(-0.5, 0.5), Point(0.5, 0.5), Point(0.5, -0.5), Point(-0.5, -0.5), ] box_y = Extrusion(profile_y, Line(Point(2, 2, 0), Point(2, 2, 1)))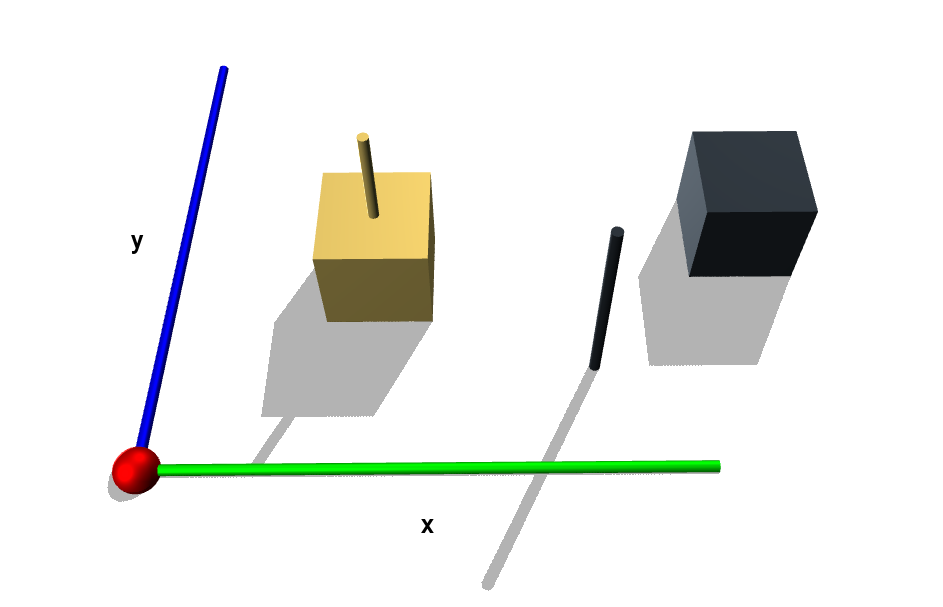
- Parameters:
profile (
List[Point]) – Coordinates of cross-section.line (
Line) – A line object is used to define the length (thickness) of the extrusion.profile_rotation (
float) – Rotation of the profile around the Z-axis in degrees.material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
- property length: float
GeoPoint
- class viktor.geometry.GeoPoint(lat, lon)
-
Geographical point on the Earth’s surface described by a latitude / longitude coordinate pair.
This object can be created directly, or will be returned in the params when using a
GeoPointField.- Parameters:
lat (
float) – Latitude, between -90 and 90 degrees.lon (
float) – Longitude, between -180 and 180 degrees.
- classmethod from_rd(coords)
Instantiates a GeoPoint from the provided RD coordinates.
- Parameters:
coords (
Tuple[float,float]) – RD coordinates (x, y).- Return type:
- property latitude: float
- New in v14.22.0
- property longitude: float
- New in v14.22.0
- property rd: Tuple[float, float]
RD representation (x, y) of the GeoPoint.
GeoPolygon
- class viktor.geometry.GeoPolygon(*points)
-
Geographical polygon on the Earth’s surface described by a list of
GeoPoints.This object can be created directly, or will be returned in the params when using a
GeoPolygonField.- Parameters:
points (
GeoPoint) – Geo points (minimum 3). The profile is automatically closed, so it is not necessary to add the start point at the end.
GeoPolyline
- class viktor.geometry.GeoPolyline(*points)
-
Geographical polyline on the Earth’s surface described by a list of
GeoPoints.This object can be created directly, or will be returned in the params when using a
GeoPolylineField.- Parameters:
points (
GeoPoint) – Geo points (minimum 2).
Group
- class viktor.geometry.Group(objects, *, identifier=None)
Bases:
TransformableObject- Parameters:
objects (
Sequence[TransformableObject]) – Objects that are part of the group.identifier (
str) – object identifier (new in v14.10.0)
- add(objects)
- Return type:
None
- property children: List[TransformableObject]
Line
- class viktor.geometry.Line(start_point, end_point, *, color=(0, 0, 0), identifier=None)
Bases:
TransformableObject- Parameters:
start_point (
Point|Tuple[float,float,float]) – Start point of the line (cannot coincide with end_point).end_point (
Point|Tuple[float,float,float]) – End point of the line (cannot coincide with start_point).color (
Color) – Visualization colorNew in v13.5.0.identifier (
str) – object identifier (new in v14.10.0)
- collinear(point)
True if point is collinear (in line) with Line, else False.
- Return type:
bool
- distance_to_point(point)
Calculate the (minimal) distance from the given point to the (unbounded) line.
- Return type:
float
- find_overlap(other, inclusive=False)
Find the overlapping part of this line with another line.
The returned value depends on the situation:
None, if no overlap is found or the two lines are not parallel
Point, if an overlap is found with length equal to 0
Line, if an overlap is found with length larger than 0
- get_line_function_parameters()
Get parameters for y=ax+b definition of a line.
- Return type:
Tuple[float,float]- Returns:
(a, b) or (nan, nan) if line is vertical
- property horizontal: bool
- property length: float
- property length_vector: numpy.ndarray
- revolve(*, material=None, identifier=None, **kwargs)
Revolve line around y-axis, only possible for lines in x-y plane.
- Parameters:
material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
- Raises:
NotImplementedError – when line is not in x-y plane
- Return type:
- property unit_vector: numpy.ndarray
- property vertical: bool
LineRevolve
- class viktor.geometry.LineRevolve(line, *args, material=None, identifier=None, **kwargs)
Bases:
RevolveReturns a revolved object of a Line around the global y-axis.
An example revolve of a line between the point (1, 1, 0) and (3, 2, 0) is shown below, with the line object shown in black.
line = Line(Point(1, 1, 0), Point(3, 2, 0)) line_rev = LineRevolve(line)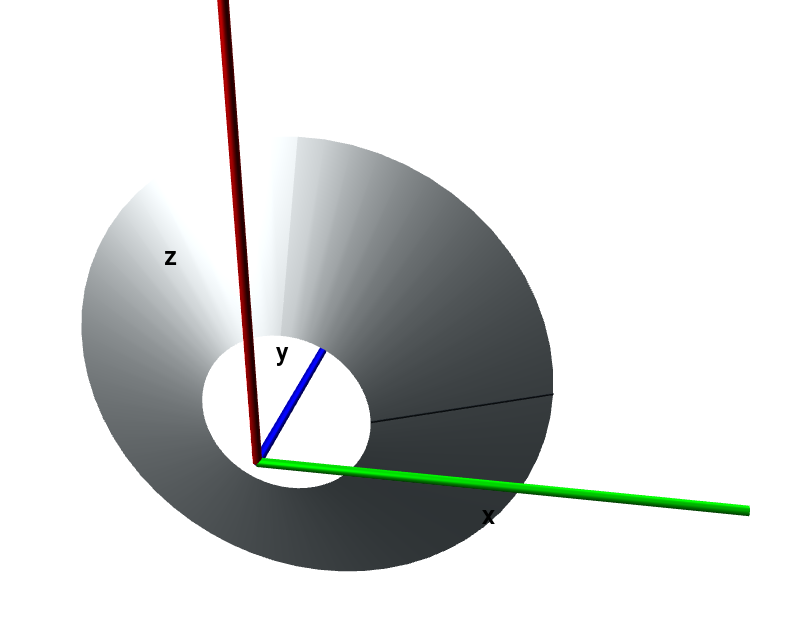
- Parameters:
- property height: float
- property inner_volume: float
Returns the inner volume of the revolved object.
This method will only return a value if the defined Line meets the following conditions:
it should NOT be horizontal, i.e. y_start != y_end
it should be defined in positive y-direction, i.e. y_start < y_end
- property surface_area: float
Returns the total exterior area of the revolved object.
- property uuid: UUID
LinearPattern
- class viktor.geometry.LinearPattern(base_object, direction, number_of_elements, spacing, *, identifier=None)
Bases:
PatternInstantiates a linear, evenly spaced, pattern along a single direction. If identifier has been set on the base-object, the identifiers of the objects within the pattern are suffixed with ‘-i’ (i = 1, 2, 3, …).
- Parameters:
base_object (
TransformableObject) – the object to be duplicateddirection (
List[float]) – a unit vector specifying in which direction the pattern propagatesnumber_of_elements (
int) – total amount of elements in the pattern, including the base objectspacing (
float) – the applied spacingidentifier (
str) – object identifier (new in v14.10.0)
Material
- class viktor.geometry.Material(name=None, density=None, price=None, *, threejs_type='MeshStandardMaterial', roughness=1.0, metalness=0.5, opacity=1.0, color=(221, 221, 221))
-
Note
The following properties were renamed since v14.5.0. If you are using a lower version, please use the old naming.
threejs_roughness -> roughness
threejs_metalness -> metalness
threejs_opacity -> opacity
(new in v14.22.0) Provide a hex value or tuple (r, g, b) as ‘color’.
- Parameters:
name (
str) – Optional name.density (
float) – Optional density.price (
float) – Optional price.threejs_type (
str) – deprecatedroughness (
float) – Between 0 - 1 where closer to 1 gives the material a rough texture.metalness (
float) – Between 0 - 1 where closer to 1 gives the material a shiny metal look.opacity (
float) – Between 0 - 1 where closer to 0 makes the material less visible.color (
str|tuple[int,int,int] |Color) – Color of the material.
Pattern
- class viktor.geometry.Pattern(base_object, duplicate_translation_list, *, identifier=None)
Bases:
GroupInstantiates a pattern based on a base object and several duplicates, each translated by an input vector. If identifier has been set on the base-object, the identifiers of the objects within the pattern are suffixed with ‘-i’ (i = 1, 2, 3, …).
- Parameters:
base_object (
TransformableObject) – the object to be duplicatedduplicate_translation_list (
List[List[float]]) – a list of translation vectors, each of which generates a duplicateidentifier (
str) – object identifier (new in v14.10.0)
Point
- class viktor.geometry.Point(x, y, z=0)
-
This class represents a point object, which is instantiated by means of 3-dimensional coordinates X, Y, and Z. It forms a basis of many structural 2D and 3D objects.
Example usage:
p1 = Point(1, 2) # create a 2D point p1.z # 0 p2 = Point(1, 2, 3) # create a 3D point p1.z # 3- Parameters:
x (
float) – X-coordinate.y (
float) – Y-coordinate.z (
float) – (optional) Z-coordinate, defaults to 0.
- Raises:
TypeError – if the point is instantiated with a None value.
- coincides_with(other)
Given another Point object, this method determines whether the two points coincide.
- Return type:
bool
- property coordinates: numpy.ndarray
Coordinates of the Point as array (X, Y, Z).
- get_local_coordinates(local_origin, spherical=False)
Method to determine the local coordinates of the current Point with respect to a ‘local origin’.
- Return type:
ndarray
- vector_to(point)
Vector pointing from self to point.
Example usage:
p1 = Point(1, 2, 3) p2 = Point(0, 0, 0) # origin v = p1.vector_to(p2) # vector from p1 to the origin v = p1.vector_to((0, 0, 0)) # short notation- Return type:
- property x: float
X-coordinate.
- property y: float
Y-coordinate.
- property z: float
Z-coordinate.
Polygon
- class viktor.geometry.Polygon(points, *, surface_orientation=False, material=None, skip_duplicate_vertices_check=False, identifier=None)
Bases:
TransformableObject2D closed polygon without holes in x-y plane.
- Parameters:
points (
list[Point]) – profile is automatically closed, do not add start point at the end. only the x and y coordinates are considered. left hand rule around circumference determines surface directionsurface_orientation (
bool) –if True, the left hand rule around circumference determines surface direction
if False, surface always in +z direction
material (
Material) – optional materialskip_duplicate_vertices_check (
bool) – if True, duplicate vertices are not filtered on serialization of the triangles. This may boost performance (default: False).identifier (
str) – object identifier (new in v14.10.0)
- Raises:
ValueError –
if less than 3 points are provided.
if points contains duplicates.
if points form a polygon with self-intersecting lines.
if points are all collinear.
- property centroid: tuple[float, float]
Returns the centroid (X, Y) of the polygon.
- property cross_sectional_area: float
- extrude(line, *, profile_rotation=0, material=None, identifier=None)
Extrude the Polygon in the direction of the given line.
- has_clockwise_circumference()
- Return type:
bool
- Method determines the direction of the input points, and returns:
True if the circumference is clockwise
False if the circumference is counter-clockwise
- property moment_of_inertia: tuple[float, float]
Returns the moment of inertia (Ix, Iy) in xy-plane.
Polyline
- class viktor.geometry.Polyline(points, *, color=(0, 0, 0), identifier=None)
Bases:
TransformableObjectRepresentation of a polyline made up of multiple straight line segments.
This class is immutable, meaning that all functions that perform changes on a polyline will return a mutated copy of the original polyline.
- Parameters:
points (
List[Point]) – List of points, which may contain duplicate points. Note that when calling the individual lines of the polyline, duplicate points are filtered (i.e. zero-length lines are omitted).color (
Color) – Visualization colorNew in v13.5.0.identifier (
str) – object identifier (new in v14.10.0)
- combine_with(other)
Given two polylines that have at least one point in common and together form one line without any side branches, combine those two polylines. The combined line will contain all points of both polylines.
- filter_duplicate_points()
Returns a new Polyline object. If two consecutive points in this polyline coincide, the second point will be omitted
- Return type:
- find_overlaps(other)
Find all overlapping regions of this polyline with another polyline. The returned overlapping regions will all point in the direction of this line. The overlap polylines will contain all points of both polylines, even if they only occur in one of the lines.
If no overlaps are found, an empty list will be returned.
- classmethod from_lines(lines)
Create a polyline object from a list of lines.
The end of one line must always coincide with the start of the next line.
- classmethod get_lowest_or_highest_profile_x(profile_1, profile_2, lowest)
Given two polylines with n intersections, return a third polyline that will always follow the lowest (or highest) of the two lines the x locations of the points of the two polylines should be not descending (lines from left to right or vertical) the returned polyline will only cover the overlapping range in x coordinates.
If one of the profiles is an empty polyline, an empty polyline will be returned.
examples:
/----------------| / /-------|-------------------- profile_1: ----------------\ / / | \ / / |_____________________________ profile_2: -------------\-/ / \_________/ get_lowest_or_highest_profile_x(cls, profile_1, profile_2, lowest=True) will return: /-------| / | / |____________________ result: -------------\ / \_________/Note that only the overlapping region of the two profiles is returned!
- Parameters:
- Return type:
Currently, this implementation is exclusive. Meaning that vertical line parts that lie on the start or end of the overlap region in x are not taken into account.
- get_polyline_between(start_point, end_point, inclusive=False)
Given two points that both lie on a polyline, return the polyline that lies between those two points start_point has to lie before end_point on this polyline.
If the given start point lies after the given end point on this polyline, an empty polyline will be returned. If the two given points are identical, it depends on the inclusive flag whether a polyline containing that point once, or an empty polyline will be returned.
- intersections_with_polyline(other_polyline)
Find all intersections with another polyline and return them ordered according to the direction of this polyline
If the polylines are partly parallel, the start and end points of the parallel section will be returned as intersections. If one of the polylines is a subset of the other, or the two lines are completely parallel, no intersections will be found.
- intersections_with_x_location(x)
Find all intersections of this polyline with a given x location. Ordered from start to end of this polyline.
If this line is partly vertical, the start and end points of the vertical section will be returned as an intersection. If this line is completely vertical, no intersections will be found.
- Parameters:
x (
float)- Return type:
List[Point]
- is_equal_to(other)
Check if all points in this polyline coincide with all points of another polyline
- Parameters:
other (
Polyline) – Other polyline- Return type:
bool
- is_monotonic_ascending_x(strict=True)
Check if the x coordinates of the points of this polyline are ascending.
- Parameters:
strict (
bool) – when set to false, equal x coordinates are accepted between points- Return type:
bool
- is_monotonic_ascending_y(strict=True)
Check if the y coordinates of the points of this polyline are ascending
- Parameters:
strict (
bool) – when set to false, equal y coordinates are accepted between points- Return type:
bool
- property lines: List[Line]
A list of lines connecting all polyline points. Lines between coincident points are skipped.
- point_is_on_polyline(point)
Check if a given point lies on this polyline
- Parameters:
point (
Point)- Return type:
bool
- serialize()
Return a json serializable dict of form:
[ {'x': point_1.x, 'y': point_1.y}, {'x': point_2.x, 'y': point_2.y} ]- Return type:
List[dict]
- split(point)
return the two separate parts of this polyline before and after the given point.
- property x_max: float | None
The highest x-coordinate present within this polyline.
- property x_min: float | None
The lowest x-coordinate present within this polyline.
- property y_max: float | None
The highest y-coordinate present within this polyline.
- property y_min: float | None
The lowest y-coordinate present within this polyline.
- property z_max: float | None
The highest z-coordinate present within this polyline.
- property z_min: float | None
The lowest z-coordinate present within this polyline.
RDWGSConverter
- class viktor.geometry.RDWGSConverter
-
Class that provides functions to translate latitude and longitude coordinates between the WGS system and RD system.
The RD coordinate system is a cartesian coordinate system that is frequently used for in civil engineering to describe locations in the Netherlands. The origin is located in france, so that for all of the Netherlands, both x (m) and y (m) values are positive and y is always larger then x. The domain in which the RD coordinate system is valid is:
x: [-7000, 300000]
y: [289000, 629000]
About the RD coordinate system: https://nl.wikipedia.org/wiki/Rijksdriehoeksco%C3%B6rdinaten
- X0 = 155000
- Y0 = 463000
- static from_rd_to_wgs(coords)
Convert RD coordinates (x, y) to WGS coordinates [latitude, longitude].
lat, lon = RDWGSConverter.from_rd_to_wgs((100000, 400000))- Parameters:
coords (
Tuple[float,float]) – RD coordinates (x, y)- Return type:
List[float]
- static from_wgs_to_rd(coords)
Convert WGS coordinates (latitude, longitude) to RD coordinates [x, y].
x, y = RDWGSConverter.from_wgs_to_rd((51.58622, 4.59360))- Parameters:
coords (
Tuple[float,float]) – WGS coordinates (latitude, longitude)- Return type:
List[float]
- lam0 = 5.38720621
- phi0 = 52.1551744
RectangularExtrusion
- class viktor.geometry.RectangularExtrusion(width, height, line, profile_rotation=0, *, material=None, identifier=None)
Bases:
ExtrusionExtruded object from a given set of points, which is called the profile. This profile should meet the following requirements:
start point should be added at the end for closed profile
points should be defined in z=0 plane
circumference should be defined clockwise
Note that the profile is defined with respect to the start point of the Line object, i.e. the profile is defined in the local coordinate system. An example is given below of two extrusions with the same dimensions. Their corresponding Line objects are also visualized. The extrusion have the following profile:
# black box profile_b = [ Point(1, 1), Point(1, 2), Point(2, 2), Point(2, 1), Point(1, 1), ] box_b = Extrusion(profile_b, Line(Point(4, 1, 0), Point(4, 1, 1))) # yellow box profile_y = [ Point(-0.5, -0.5), Point(-0.5, 0.5), Point(0.5, 0.5), Point(0.5, -0.5), Point(-0.5, -0.5), ] box_y = Extrusion(profile_y, Line(Point(2, 2, 0), Point(2, 2, 1))) - Parameters:
profile – Coordinates of cross-section.
line (
Line) – A line object is used to define the length (thickness) of the extrusion.profile_rotation (
float) – Rotation of the profile around the Z-axis in degrees.material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
- property cross_sectional_area: float
Returns the area of the cross-section (width x height).
- property height: float
Height of the extrusion.
- property inner_volume: float
Returns the inner volume of the extruded object.
- property width: float
Width of the extrusion.
Revolve
- class viktor.geometry.Revolve(*args, rotation_angle=None, material=None, identifier=None, **kwargs)
Bases:
TransformableObject,ABCAbstract base class of a revolved object.
- abstract property inner_volume: float
- property mass: float
Calculates the mass of the object as rho * area * thickness, with rho the density of the Material.
- abstract property surface_area: float
- property thickness: float
Sphere
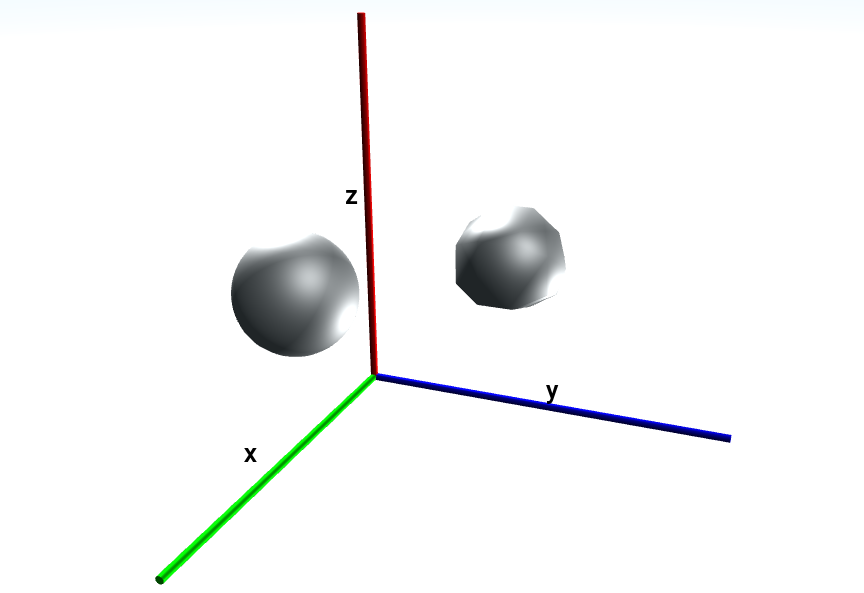
- class viktor.geometry.Sphere(centre_point, radius, width_segments=30, height_segments=30, material=None, *, identifier=None)
Bases:
TransformableObjectThis class can be used to construct a spherical object around the specified coordinate.
The smoothness of the edges can be altered by setting width_segments and height_segments. In the example below both the default smoothness of 30 (left) and a rough sphere with 5 segments (right) is shown:
- Parameters:
centre_point (
Point) – Center point of the sphere.radius (
float) – Radius of the sphere.width_segments (
float) – Sets the smoothness in xz-plane.height_segments (
float) – Sets the smoothness in yz-plane.material (
Material) – Optionally a custom material can be set.identifier (
str) – object identifier (new in v14.10.0)
- circumference()
- Return type:
float
- diameter()
- Return type:
float
- surface_area()
- Return type:
float
- volume()
- Return type:
float
SquareBeam
- class viktor.geometry.SquareBeam(length_x, length_y, length_z, *, material=None, identifier=None)
Bases:
RectangularExtrusionHigh level object to create a rectangular beam object around the origin. The centroid of the beam is located at the origin (0, 0, 0).
- Parameters:
length_x (
float) – Width of the extrusion in x-direction.length_y (
float) – Length of the extrusion in y-direction.length_z (
float) – Height of the extrusion in z-direction.material (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
Torus
- class viktor.geometry.Torus(radius_cross_section, radius_rotation_axis, rotation_angle=6.283185307179586, *, material=None, identifier=None)
Bases:
GroupCreate a torus object
- Parameters:
radius_cross_section (
float)radius_rotation_axis (
float) – measured from central axis to centre of cross-section.rotation_angle (
float) – optional argument to control how large of a torus section you want. 2pi for complete torusmaterial (
Material) – optional materialidentifier (
str) – object identifier (new in v14.10.0)
- property inner_volume: float
TransformableObject
- class viktor.geometry.TransformableObject(*, identifier=None)
Bases:
ABC- mirror(point, normal)
Mirror an object on a plane defined by a point and normal vector.
- Parameters:
- Return type:
- rotate(angle, direction, point=None)
Rotate an object along an axis (direction) by an angle. Direction will follow right hand rule.
- Parameters:
- Return type:
- scale(scaling_vector)
Scale an object along a scaling vector.
- Parameters:
scaling_vector (
Vector|Tuple[float,float,float]) – Vector along which scaling is to be performed.- Return type:
Triangle
- class viktor.geometry.Triangle(point1, point2, point3)
-
Creates a Triangle object from 3D vertices.
- Parameters:
- area()
Returns the area of the triangle.
- Return type:
float
- property centroid: Tuple[float, float, float]
Returns the centroid (X, Y, Z) of the triangle.
- property moment_of_inertia: Tuple[float, float]
Returns the moment of inertia (Ix, Iy) (only in x-y plane).
TriangleAssembly
- class viktor.geometry.TriangleAssembly(triangles, *, material=None, skip_duplicate_vertices_check=False, identifier=None)
Bases:
TransformableObjectFundamental visualisation geometry, built up from triangles. Right hand rule on triangle circumference determines the surface direction.
- Parameters:
triangles (
List[Triangle]) – Triangles of the assembly.material (
Material) – optional material.skip_duplicate_vertices_check (
bool) – if True, duplicate vertices are not filtered on serialization of the triangles. This may boost performance (default: False).identifier (
str) – object identifier (new in v14.10.0)
Vector
- class viktor.geometry.Vector(x, y, z=0)
-
A 3-dimensional vector in space.
The following operations are supported:
Negation
v1 = Vector(1, 2, 3) v2 = -v1 # results in Vector(-1, -2, -3)Addition
v1 = Vector(1, 2, 3) v2 = Vector(1, 2, 3) v3 = v1 + v2 # results in Vector(2, 4, 6)Subtraction
v1 = Vector(1, 2, 3) v2 = Vector(1, 2, 3) v3 = v1 - v2 # results in Vector(0, 0, 0)(reverse) Multiplication
v1 = Vector(1, 2, 3) v2 = v1 * 3 # results in Vector(3, 6, 9) v3 = 3 * v1 # results in Vector(3, 6, 9)Dot product
v1 = Vector(1, 2, 3) v2 = Vector(1, 2, 3) res = v1.dot(v2) # results in 14Cross product
v1 = Vector(1, 0, 0) v2 = Vector(0, 1, 0) v3 = v1.cross(v2) # results in Vector(0, 0, 1)
- Parameters:
x (
float) – X-coordinate.y (
float) – Y-coordinate.z (
float) – Z-coordinate (default: 0).
- property coordinates: Tuple[float, float, float]
Coordinates of the Vector as tuple (X, Y, Z).
- cross(other)
Vector product of two vectors.
- dot(other)
Scalar product of two vectors.
- Parameters:
other (
Vector) – Second Vector- Return type:
float
- property magnitude: float
Magnitude of the Vector.
- normalize()
Return the normalized vector (with unit-length).
- Raises:
ValueError – if vector is a null-vector.
- Return type:
- property squared_magnitude: float
Vector magnitude without square root; faster than magnitude.
add_point
- viktor.geometry.add_point(unique_points, point)
Adds a Point object to a unique list of Point objects. The point is only added when not already present in the list.
calculate_distance_vector
- viktor.geometry.calculate_distance_vector(start_point, end_point)
Calculates the distance between start and end point in the direction start -> end.
calculate_intersection_bounded_line_extended_line
- viktor.geometry.calculate_intersection_bounded_line_extended_line(bounded_line, extended_line, inclusive=True)
Calculate intersection between line with fixed endpoints and line which is indefinitely extended.
calculate_intersection_bounded_line_with_y
- viktor.geometry.calculate_intersection_bounded_line_with_y(line, y_intersection)
Calculate x intersection between two points and y value. Return None if no intersection is found.
Returns x: Returns None: o / y-----/--- y--------- /: o / : / o x o- Parameters:
line (
Line) – Line object.y_intersection (
float) – y-value of the intersection line.
- Return type:
float|None
calculate_intersection_bounded_lines
- viktor.geometry.calculate_intersection_bounded_lines(bounded_line1, bounded_line2, inclusive=True)
Calculate intersection between two lines with fixed endpoints (2D only, Z-coordinate is ignored!).
calculate_intersection_extended_line_with_x
- viktor.geometry.calculate_intersection_extended_line_with_x(line, x)
Returns the point at which a given line intersects a vertical axis at position x.
Returns P(x, y): Returns P(x, y): o / y-----P--- y-----P---- /: o: / : / : o x o x
calculate_intersection_extended_line_with_y
- viktor.geometry.calculate_intersection_extended_line_with_y(line, y_intersection)
Calculates the intersection x value of a line at a given y value.
Returns x: Returns x: o / y-----/--- y---------- /: o: / : / : o x o x- Parameters:
line (
Line) – Line object.y_intersection (
float) – y-value of the intersection line.
- Return type:
float
calculate_intersection_extended_lines
- viktor.geometry.calculate_intersection_extended_lines(extended_line1, extended_line2)
Calculate intersection between two lines defined by start/end points. The lines are assumed to extend infinitely: bounds are not taken account. Returns None if lines are parallel (i.e. no intersection exists).
Returns P(x, y): Returns P(x, y): Returns None: o / o-----P---o o--o P o-----o / o / / o--o o o
cartesian_to_cylindrical
- viktor.geometry.cartesian_to_cylindrical(cartesian_coordinates)
Using ISO convention: https://commons.wikimedia.org/wiki/File:Coord_system_CY_1.svg
Reference plane is former Cartesian xy-plane and cylindrical axis is the Cartesian z-axis.
- Parameters:
cartesian_coordinates (
Tuple[float,float,float]) – Cartesian coordinates (x, y, z).- Return type:
ndarray- Returns:
Cylindrical coordinates (rho, phi, z) with phi between -pi and +pi.
{kind=link}
cartesian_to_spherical
- viktor.geometry.cartesian_to_spherical(cartesian_coordinates)
Using ISO/physical convention: https://upload.wikimedia.org/wikipedia/commons/4/4f/3D_Spherical.svg
- Parameters:
cartesian_coordinates (
Tuple[float,float,float]) – Cartesian coordinates (x, y, z).- Return type:
ndarray- Returns:
Spherical coordinates (r, theta, phi).
{kind=link}
circumference_is_clockwise
convert_points_for_lathe
cylindrical_to_cartesian
- viktor.geometry.cylindrical_to_cartesian(cylindrical_coordinates)
Using ISO convention: https://commons.wikimedia.org/wiki/File:Coord_system_CY_1.svg
Reference plane is former Cartesian xy-plane and cylindrical axis is the Cartesian z-axis.
- Parameters:
cylindrical_coordinates (
Tuple[float,float,float]) – Cylindrical coordinates (rho, phi, z).- Return type:
ndarray- Returns:
Cartesian coordinates (x, y, z).
find_overlap
- viktor.geometry.find_overlap(region_a, region_b, inclusive=False)
Given to regions with upper and lower boundary, check if there is overlap and if so return a tuple with the overlap found
The direction of the given regions does not matter: (1, 2) will be handled exactly the same as (2, 1) The returned Tuple will always be in ascending order
Example usage:
find_overlap((2, 4), (3, 5)) -> (3, 4) find_overlap((4, 2), (5, 3)) -> (3, 4) find_overlap((2, 3), (3, 4)) -> None find_overlap((2, 3), (3, 4), inclusive=True) -> (3, 3)- Parameters:
region_a (
Tuple[float,float]) – Tuple of values of the first region.region_b (
Tuple[float,float]) – Tuple of values of the second region.inclusive (
bool) – A flag to decide whether a point overlap is counted as overlap or not.
- Return type:
None|Tuple[float,float]- Returns:
A tuple with upper and lower bounds of the overlapping region, or None.
get_line_function_parameters
- viktor.geometry.get_line_function_parameters(line)
Returns the line function parameters (a, b) of a line (y = ax + b).
- Return type:
Tuple[float,float]
get_vertices_faces
line_is_horizontal
- viktor.geometry.line_is_horizontal(line)
Returns True if line is horizontal.
- Return type:
bool
line_is_vertical
- viktor.geometry.line_is_vertical(line)
Returns True if line is vertical.
- Return type:
bool
lines_in_same_plane
mirror_object
- viktor.geometry.mirror_object(obj, point, normal)
Function that mirrors an object through a plane. The plane is defined by a point and a normal vector. The return is a copy of the original object, mirrored over the specified plane.
- Parameters:
obj (
TransformableObject) – Object that is to be mirroredpoint (
Point) – Point object on the desired mirror planenormal (
Vector|Tuple[float,float,float]) – Vector that denotes a normal vector of the desired mirror plane.
- Return type:
point_is_on_bounded_line
- viktor.geometry.point_is_on_bounded_line(point, line, inclusive=True)
Check whether a given Point object is within the ends of a Line.
- Parameters:
- Return type:
bool
points_are_coplanar
- viktor.geometry.points_are_coplanar(points)
Determine whether all given points are coplanar (are on a two-dimensional plane).
- Parameters:
points (
Sequence[Point|Tuple[float,float,float]]) – points to be evaluated (min. 3).- Return type:
bool
Example usage:
points = [[Point(0, 3, 1), Point(0, 5, 1), Point(2, 3, 4), Point(2, 5, 4)]] coplanar = points_are_coplanar(points) coplanar = points_are_coplanar([(0, 3, 1), (0, 5, 1), (2, 3, 4), (2, 5, 4)])
reflection_matrix
- viktor.geometry.reflection_matrix(point, normal)
Returns the reflection matrix to mirror at a plane defined by a point and a normal vector.
rotation_matrix
- viktor.geometry.rotation_matrix(angle, direction, point=None)
Returns the rotation matrix that corresponds to a rotation about an axis defined by a point and direction. Angle in radians, direction in accordance to right-hand rule.
Example:
R = rotation_matrix(pi/2, [0, 0, 1], [1, 0, 0]) np.allclose(np.dot(R, [0, 0, 0, 1]), [1, -1, 0, 1]) # True- Return type:
ndarray
scaling_matrix
spherical_to_cartesian
- viktor.geometry.spherical_to_cartesian(spherical_coordinates)
Using ISO/physical convention: https://upload.wikimedia.org/wikipedia/commons/4/4f/3D_Spherical.svg
- Parameters:
spherical_coordinates (
Tuple[float,float,float]) – Spherical coordinates (r, theta, phi).- Return type:
ndarray- Returns:
Cartesian coordinates (x, y, z).
surface_area_dome
- viktor.geometry.surface_area_dome(theta1, theta2, r, R)
Computes the surface area of a dome (arc-revolve).
- Parameters:
theta1 (
float) – Starting angle of arc in radians.theta2 (
float) – Ending angle of arc in radians.r (
float) – Radius of arc.R (
float) – Distance from centre of arc to rotation line.
- Return type:
float- Returns:
surface area of arc-revolve.
surface_cone_without_base
- viktor.geometry.surface_cone_without_base(r, h)
Calculates the exterior surface of the cone, excluding the area of the circular base.
- Parameters:
r (
float) – Radius of the base.h (
float) – Height of the cone.
- Return type:
float
translation_matrix
unit_vector
- viktor.geometry.unit_vector(data, axis=None, out=None)
Returns the unit vector of a given vector.
- Return type:
ndarray|None
volume_cone
- viktor.geometry.volume_cone(r, h)
Calculates the volume of a cone.
- Parameters:
r (
float) – Radius of the base.h (
float) – Height of the cone.
- Return type:
float
x_between_bounds
- viktor.geometry.x_between_bounds(x, x1, x2, inclusive=True)
Method checks whether the x value is between the bounds x1 and x2.
- Parameters:
x (
float) – x-value to be evaluated.x1 (
float) – Lower bound.x2 (
float) – Upper bound.inclusive (
bool) – If set to True, this method will also return True when the x value is equal to either x1 or x2.
- Return type:
bool
y_between_bounds
- viktor.geometry.y_between_bounds(y, y1, y2, inclusive=True)
Method checks whether the y value is between the bounds y1 and y2.
- Parameters:
y (
float) – y-value to be evaluated.y1 (
float) – Lower bound.y2 (
float) – Upper bound.inclusive (
bool) – If set to True, this method will also return True when the y value is equal to either y1 or y2.
- Return type:
bool